Le but de la mécanique analytique est de simplifier et de généraliser la mécanique newtonienne, en particulier dans les systèmes où les mouvements sont sujets à des contraintes ou à des perturbations.
Pour illustrer ces problèmes, un cas instructif classique de contrainte et simple à résoudre, est celui du double-pendule.
La mécanique analytique permet de ne pas tenir compte des inconnues qui compliquent le problème en employant des coordonnées soumises à aucune contrainte.
La théorie des perturbations est un domaine des mathématiques, qui consiste à étudier les contextes où il est possible de trouver une solution approchée à une équation en partant de la solution d'un problème plus simple.
Par exemple, on cherche une solution approchée à une équation $E_\lambda$, dépendante d'un paramètre $\lambda$, sachant que la solution de l'équation $E_0$, correspondant à la valeur $\lambda=0$, est connue exactement.
Vue d'ensemble
La mécanique analytique étudie l'évolution des degrés de libertés d'un système complexe, et ne s'appuie plus sur le point matériel de Newton, dans ce qu'on appelle un espace de configuration
L'espace de configuration est l'ensemble des positions possibles que ce système peut atteindre.
C'est une méthode variationnelle qui ne précise pas à chaque instant le mouvement de la particule mais où l'on donne comme condition à l'intégrale portant sur l'ensemble du mouvement d'être extrémale : on recherche une courbe de longueur minimale (ou extrémale), autrement dit une géodésique.
Les coordonnées généralisées, qui peuvent ne pas correspondre à des coordonnées cartésiennes, d'où leur nom, - positions relatives, mais aussi, des angles… - sont des coordonnées indépendantes des contraintes et définissent de manière univoque l'état mécanique du système qui supporte les contraintes.
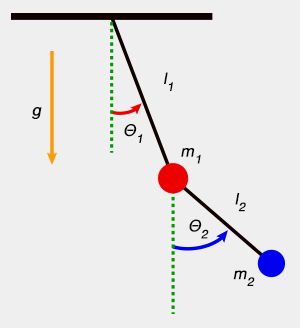
Mouvement du pendule double
Ces coordonnées sont notées $q_i$, $\{q_1, q_2,...q_n\}$ avec $n\leqslant 3N$, où N est le nombre de points permettant de décrire le système.
Le mouvement pourra être calculé en utilisant une équation différentielle pour chacune de ces coordonnées.
Dans le cas du double pendule, seuls deux variables indépendantes, les angles $\theta_1$ et $\theta_2$ suffisent à décrire le mouvement du système : on ne prendra en compte que ces deux coordonnées généralisées contre 6 pour la position des deux masses.
En mécanique lagrangienne, le lagrangien $\mathcal L[\varphi_i]$ d'un système dynamique est une fonction des variables dynamiques qui permet d'écrire de manière concise les équations du mouvement du système.
Si les coordonnées généralisées des particules sont $\{q_i\}_{i=1,2,...,N}$ et leurs vitesses, $\{\dot{q}_i\}_{i=1,2,...,N}$ avec $\dot{q}_i=\dfrac{dq_i}{dt}$, alors la fonction s'écrit : $\mathcal L(q_i,\dot{q}_i,t)$
Joseph-Louis Lagrange (1736–1813)
L'action sur le système est alors, entre les temps $t_1$ et $t_2$ entre $q(1)$ et $q(2)$ qui sont les valeurs initiales et finales des coordonnées généralisées : $S=\int\limits_{t_1}^{t_2}\;L (q_i,\dot{q}_i,t)dt$.
Cette fonction ne dépend que de positions et de vitesses (d'ordre 2, par rapport au temps)
Elle prend en compte les positions initiales et finales de chaque coordonnée (et le temps), et non les positions et les vitesses initiales.
Prenons deux trajectoires possibles entre $q(1)$ et $q(2)$, la première est $q_i(t)$, la deuxième ne variant que de $\delta q_i(t)$ de la précédente. Les trajectoires obéissant aux mêmes positions initiales et finales : $\delta q(1)=\delta q(2)=0$.
La variation $\delta S$ de l'action est : $\delta S=\int\limits_{t_1}^{t_2}\;(L (q_i+\delta q_i, \dot{q}_i+\dot{q}_it,t)-L (q_i,\dot{q}_i,t))dt$.
En développant (cf. démonstration), on trouve : $\dfrac{d}{dt}\left(\dfrac{\partial L}{\partial\dot{q}_i}\right)=\dfrac{\partial L}{\partial q_i}$, si $(1\leqslant i\leqslant n)$, c'est-à-dire les équations d'Euler-Lagrange.
Si les coordonnées généralisées correspondent aux coordonnées cartésiennes, alors : $\nabla_{r\alpha}L=d\nabla{v_\alpha}L/dt$, en faisant intervenir les opérateurs laplaciens par rapport aux positions et aux vitesses des particules.
On peut voir, dans l'expression de la fonction de Lagrange d'une particule unique libre (p: 24 de la mécanique analytique), la démarche à utiliser pour déterminer la forme du lagrangien : propriétés des symétries, règles de la relativité galiléenne, recherche de la forme la plus simple en cas d'ambigüité.
On peut utiliser le principe de d'Alembert, de l'encyclopédiste Jean Le Rond d’Alembert (1717-1783) pour arriver au même résultat, i.e. l'ensemble des forces de contrainte d'un système ne travaille pas lors d'un déplacement virtuel.
$L=T-U$ avec $p_i=\dfrac{\partial T}{\partial\dot q_i}$ et $\mathcal F=-\dfrac{\partial U}{\partial q_i}$, $p_i$ et $\mathcal F$, étant respectivement l'impulsion et le champ de force dans un espace cartésien et $T$ l'énergie cinétique et $U$ l'énergie potentielle.
Alors, $p_i=\dfrac{\partial L}{\partial\dot q_i}$ et $\mathcal F=\dfrac{\partial L}{\partial q_i}$ car $p$ ne dépend pas de la position ($U=0$), et $\mathcal F$ de la vitesse ($T=0$).
William Rowan Hamilton (1805-1865)
Les équations de Lagrange sont des équations différentielles du second ordre portant sur la position et le temps, et pas forcément faciles à résoudre.
Les équations d'Hamilton transforment celles de Lagrange en deux équations différentielles du premier ordre, reliant position et impulsion qui s'intègrent bien plus facilement et permettent les changements de variables.
En outre, elles prennent en compte les perturbations, comme dans le cas de la mécanique céleste (action des autres planètes), mais aussi, et surtout, de formuler la mécanique classique qui peut être quantifiée.
Impulsion généralisée
En mécanique hamiltonienne, on remplace la vitesse généralisée par la quantité de mouvement associée, appelée moment conjugué ou impulsion généralisée :
La quantité de mouvement et l'impulsion ne recouvrent pas les mêmes notions en mécanique analytique : dans un champ électromagnétique, il faut ajouter le vecteur potentiel (qui dépend de la charge de la particule), ce que nous retrouverons plus bas dans les énergies.
Dans le cas d'une particule chargée en mouvement dans un champ électromagnétique, impulsion et quantité de mouvement diffèrent en raison d'un terme en $q\vec A$ dû au potentiel vecteur, q étant la charge de la particule. L'analogue " angulaire " du moment linéaire est le moment angulaire généralement confondu avec le moment cinétique.
En mécanique quantique, $p$ est l'opérateur d'impulsion qui agit sur la fonction d'onde $\psi(r,t)$ pour en extraire ses valeurs propres : $\hat p=-i\hbar\nabla$.
Les équations de Lagrange s'écrivent alors : $\dot{p_i}=\dfrac{\partial\mathcal L}{\partial q_i}$.
La différentielle du lagrangien est : $dL=\sum\limits_{i}p_id\dot q_i+\sum\limits_{i}\dot p_idq_i$.
L'hamiltonien $H$ est la transformée de Legendre - opération mathématique qui, schématiquement, transforme une fonction définie par sa valeur en un point en une fonction définie par sa tangente - du lagrangien s'écrit : $H=\sum \limits_ip_i\dot q_i-L$.
Sa dérivation est : $dH=\sum\limits_{i}\dot q_idp_i-\sum\limits_{i}\dot p_idq_i$.
Les équations d'Hamilton, correspondant aux équations de Lagrange, définissent l'opérateur d'évolution du système : $\dot q_i=\dfrac{\partial H}{\partial p_i}$ et $\dot p_i=-\dfrac{\partial H}{\partial q_i}$.
Ces équations différentielles sont du premier ordre par rapport aux lagrangiennes du second ordre.
Les conditions initiales sont des positions et des impulsions, contre des positions et des vitesses dans les équations de Lagrange.
Ces équations sont symétriques.
Si $q_i$ est cyclique, alors p_i est une constante du mouvement, i.e. dans l'espace de phase, la trajectoire suivie est tangente aux surfaces égalisant l'hamiltonien.
Dans un système conservatif, (coordonnées généralisées indépendantes du temps t), on peut montrer que : $H=E=T+V$ où $E$ est l'énergie totale, somme de l'énergie cinétique $T$ et de l'énergie potentielle $V$.
Le crochet de Poisson, du mathématicien Siméon Denis Poisson (1781-1840) de deux observables $A$ $ et $B$, i.e. deux fonctions sur l'espace de phases d'un système physique, est défini par :
Les commutateurs donnent une idée de la façon dont une loi n'est pas commutative et leur définition est différente suivant :
1. les groupes : soient $g$ et $h$ $\in(G,\star)$, le commutateur de $g$ et $h$ est l'élément du groupe défini par $[g,h]=g\star h\star g^{-1}\star h^{-1}$ ;
Le commutateur de deux opérateurs sur un espace de Hilbert permet de savoir si deux observables peuvent être mesurés simultanément. Le principe d'incertitude est en quelque sorte un théorème sur les commutateurs.
Si un hamiltonien commute avec un opérateur de transformation $U$, alors $[HU]=0$ et nous retrouvons le théorème de Noether et les invariances en physique.
L'anticommutateur est défini comme $\{A,B\}=AB+BA$.







{kind=link}