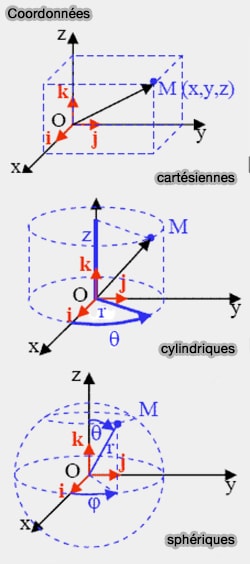
L'origine du vecteur position se situe à l'origine du repère ($O$), l'autre extrémité du vecteur se trouve à l'endroit du point ($M$), le vecteur est appelé $\vec{OM}$.
Principia mathematica de Newton
(Figure : Joe Keatinge)
Ce vecteur peut être défini dans :
un système de coordonnées cartésiennes ($x,y,z$) du point M : $\vec{OM}=x\vec{e_x}+y\vec{e_y}+z\vec{e_z}$.
un système de coordonnées cylindriques ($r, \theta, z$) du point M : $\vec{OM}=r\vec{xe_r}+z\vec{e_z}$ avec $x=r\cos(\theta)$ et $y=r\sin(\theta)$
un système de coordonnées sphériques ($r, \theta, \phi$) du point M : $\vec{OM}=r\vec{xe_r}$ avec $x=r\cos(\theta)\sin(\phi)$ et $y=r\sin(\theta)\sin(\phi)$ et $z=r\cos(\phi)$.
La masse et la position de l'objet, ainsi que le temps permettent, par exemple, de définir :
la trajectoire de cet objet : $O(x,y,z)= f(t)$,
sa quantité de mouvement…
Quantité de mouvement
Coordonnées (Figure : vetopsy.fr )
La notion de quantité de mouvement, $(\vec{p_M}=m\vec{v_M})$, comme celle de l'énergie totale, se conserve pour un système isolé, c'est-à-dire soumis à aucune action extérieure, ou si celles-ci sont négligeables ou se compensent. Ses unités sont M.L.T-1.
La relation fondamentale de la dynamique exprime le fait que l'action d'une force extérieure sur un système conduit à une variation de sa quantité de mouvement : $\dfrac {d\vec p}{dt}=\overrightarrow {F_{ext}}$
En mécanique classique, le moment cinétique (ou moment angulaire) $L$ d'un point matériel $M$ par rapport à un point $O$ correspond au moment de la quantité de mouvement $\vec p$ par rapport au point $O$, i.e. le produit vectoriel $\vec {OM}\wedge\vec p$ ou $\vec L=\vec r\wedge\vec p$ où $\vec r$ est le vecteur position et $\wedge$ est appelé produit extérieur. Ses unités sont M.L2.T-1.
La notion de produit extérieur permet de rendre compte de façon algébrique des concepts de parallélogrammes, parallélépipèdes… de dimension quelconque, vus comme produits des vecteurs qui en représentent les côtés.
Dans la mécanique classique, le vecteur position et la quantité de mouvement décrivent complètement l'état d'un point matériel ($\vec r_M,\vec p_M$).
En d'autres termes, l'état du système, qui décrit tous les aspects de ce système - système dans le sens de partie de l'univers physique choisi pour l'analyse -, permet de déterminer exactement le résultat de mesures qu'on peut y réaliser. Cet état est représenté par un ensemble de grandeurs physiques.
L'état du système est repéré par un point dans l'espace des phases- espace abstrait dans lequel tous les états dynamiques possibles d'un système sont représentés - : chaque état possible correspondant à un point unique dans cet espace.
La dimension d'un espace est le nombre de variables qui servent à définir un état.
Angles d'Euler
(Figure : d'après Xavax)
Pour un point matériel, l'espace de phase est de dimension 6 (6 variables dynamiques) : les 3 variables de position ($q_i\rightarrow x, y, z$) et les trois variables de quantité de mouvement (et $p_i\rightarrow p_x, p_y, p_z$ avec $p_x=mv_x,\;p_y=mv_y,\;p_z=mv_z$).
Degrés de liberté
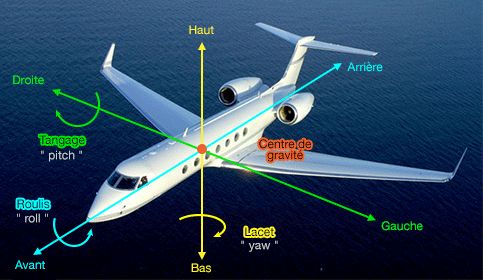
Les variables dynamiques sont appelées degrés de liberté, ici 6. Si on prend l'exemple d'un avion qui vole, ou une barque sur l'eau, les 6 mouvements sont :
3 rotations (roulis, autour de l'axe longitudinal, le tangage autour de l'axe transversal, lacet autour de l'axe vertical.
Les trois angles correspondent aux angles d'Euler qui décrivent l'orientation d'un solide. Les trois rotations d'Euler sont obtenues en changeant un des trois angles d'Euler et en gardant les deux autres constants (animation) :
Degrés de liberté d'un avion
(Figure : vetopsy.fr)
Si nous prenons N points, l'espace des phases aura 6N dimensions, correspondant à $\{q_i\}_{i=1,2,...,N}$ et $\{p_i\}_{i=1,2,...,N}$. L'état du système à l'instant t + $\tau$ se déduit de l'état du système à l'instant t à partir de toutes les lois de la dynamique.
Lois de Newton
En mécanique newtonienne, les équations du mouvement sont données par les lois de Newton.
Une particule est souvent noté $\alpha$, sa position $r_\alpha$, sa vitesse, $v_\alpha=\dot r_\alpha$, son accélération, $av_\alpha=\dot r_\alpha=\ddot r_\alpha$.
La seconde loi montre que : $f$, la force exercée est égale à la masse multipliée par l'accélération : $f_\alpha=m_\alpha a_\alpha=q_\alpha(E(r_\alpha)+v_\alpha\times B(r_\alpha))$ dans laquelle $E$ et $B$ sont les champs électrique et magnétique déterminés, en fonction des positions de particules, par la solution des équations de Maxwell.
Les énoncés des trois lois par Newton sont les suivants :
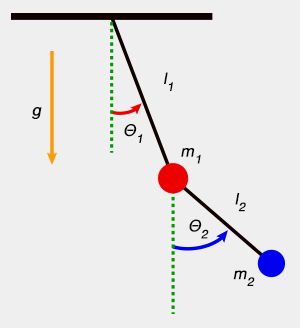
Pendule double
(Figure : vetopsy.fr) Première loi de Newton ou principe d'inertie :« La force inhérente à la matière (vis insita) est le pouvoir qu'elle a de résister. C’est par cette force que tout corps persévère de lui-même dans son état actuel de repos ou de mouvement uniforme en ligne droite. »
La résolution de toutes les équations, si elle est possible, est compliquée, surtout quand s'exercent des contraintes comme il en existe entre particules, contraintes qui sont de nouvelles inconnues qu'on doit résoudre.
Pour illustrer ces problèmes, un cas instructif classique de contrainte, et simple à résoudre, est celui du double-pendule, bien décrit dans la mécanique analytique.





{kind=link}
 animation) :
animation) :